인간친화형 자동차의 HMI
김성필 박사(국립재활원 재활연구소)
왜 기술은 발전했는데 교통사고는 줄어들지 않는 것일까? 운전자는 운전과 관련한 정보의 90% 이상을 시각적으로 얻고 있다. 그런데 차량 내 다양한 정보 기기들은 운전자의 시각 분산을 유발하거나 다량의 정보를 무분별하게 제공함으로써 운전자의 인지부하를 높이기도 한다. 실제로 운전자가 운전 중에 휴대폰, 네비게이션, 하이패스 단말기의 사용하다가 갑자기 끼어드는 차량을 보지 못해 사고가 나는 경우가 많다. 그렇다면 운전자 없이 자동차 혼자서 운전하는 자율주행 자동차가 개발되면 문제가 해결되지 않을까? 현재로서는 일부 선택적인 상황에서만 자율주행 기능을 사용할 수 있어 아주 완벽한 자율주행자동차가 개발되고 안전하게 운행 가능한 인프라가 갖추어지기 전까지는 운전자가 통제해야 할 것이다. 사람이 차량에 탑승하고 있는 이상, 자율주행자동차 설계 시 사람의 인지 및 행동 패턴에 대한 이해가 꼭 필요하다.
자율주행자동차는 인간의 정보처리모델로 작동 매커니즘의 해석이 가능하다. 먼저 자율주행자동차는 탑재된 레이저, 라이더, 카메라와 같은 센서(sensor)들로부터 외부정보를 읽어 들인다(센싱sensing). 그리고 센서들로부터 수집한 정보를 바탕으로 주변 상황을 파악한다(지각perception). 운행 중 충돌소요시간(time to collision; TTC)을 계산하여 TTC가 짧아지면 급정거하도록 한다(선택decision making). 마지막으로 위험상황일 경우 브레이크를 밟거나, 방향을 바꾸거나 경고를 하는 등의 행동을 수행한다(실행action). 자율주행자동차 설계 시 위의 정보처리 전 단계를 고려하는 것은 물론 사람이 상황에 따라 어떻게 반응할지에 대한 인간적인 요소가 함께 고려되어야 한다.
Vehicle automation as having five levels (source: U.S. Department of Transportation, 2013)
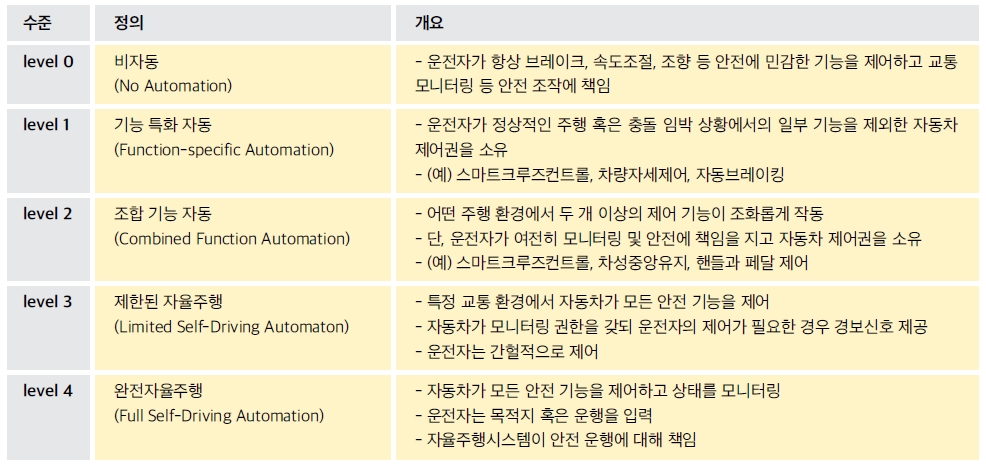
미국 도로교통안전국(NHTSA, 2013)은 운전자의 주행조작 개입 정도에 따라 자율주행의 레벨을 0단계부터 4단계까지의 총 5단계로 나누고 있다. 전문가들은 2020년엔 레벨 3단계가 가능할 것이라 예측하고 있지만 자율주행자동차가 상용화·대중화 되기 위해서는 사회적·기술적으로 해결해야 할 문제들이 많다. 먼저 사회적으로 운전자들이 자율주행자동차를 믿고 운전을 맡길 수 있는 환경이 갖추어져야 한다(운전자 수용성). 또한 모든 자동차가 자율주행자동차라면 문제없지만, 기존의 자동차와 자율주행자동차가 함께 운행된다면 기존 자동차의 불확실성이 매우 크기 때문에 위험성 또한 높아진다. 그리고 한시적인 자율주행 상황에서 운전자가 제어권을 가지고 와야 하는 상황과 이 경우 발생 가능한 사고에 있어 법적 책임(liability)에 대한 고려가 필요하다. 이 외에도 현재로서는 너무 비싼 센서의 비용문제, 새로운 법규 제정 필요성, 인프라 구축과 같은 많은 부분이 해결되어야 한다. 기술적으로는 차세대 IVN, 응용분야, 무선통신, 정밀측위, 기능구조, 환경센서, 프로세서, HMI manager, 차량보안과 같은 부문이 개발되어야 안전한 자율주행자동차의 상용화가 가능할 것이다.